路萌头部后方有一个条形触摸感应区。将手掌放到条形触摸感应区时,机器人会发出一声“滴”的提示音,这表示机器人进入了推行模式。手掌离开时,会再次发出一声“滴”的提示音,表示退出推行模式。
将手掌持续放在条形感应区,可推动机器人前进或后退。左右摆动机器人身体可进行转弯。
当需要搬起机器人时,请抓住机器人提手并按下提手内的隐形卸力按钮后再抬起机器人。
具体操作流程可查看视频教程 路萌的变形功能和触摸板使用
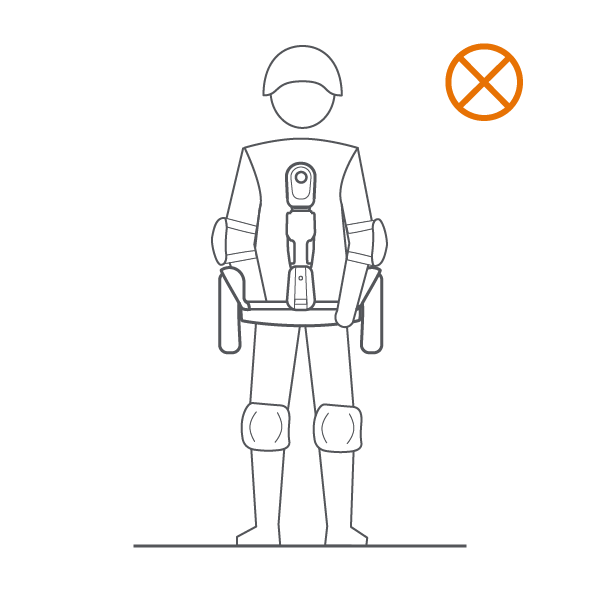
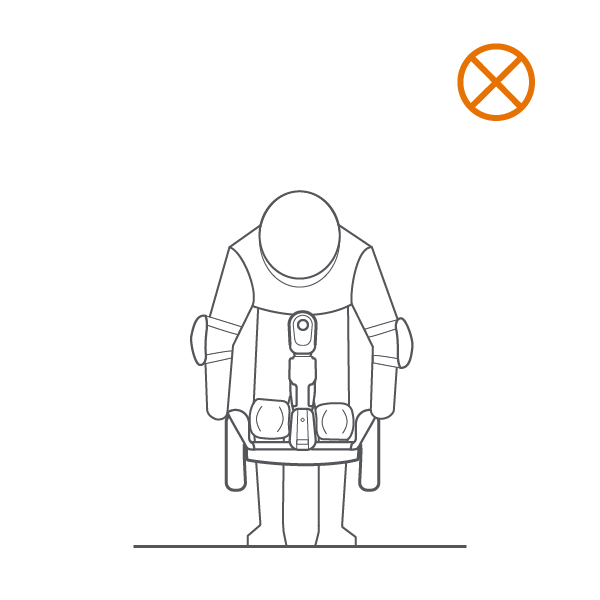
警告:
由于机器人的自平衡机制,错误的移动方式将会导致轮子快速转动,有可能对您和他人造成伤害。所以当机器人在开机状态时,严禁使用以下两种方式抬起机器人。